








Our client testimonials
A flexible 3D environment for sensor simulation
Create SIL (Software-in-the-Loop) tests and HIL (Hardware-in-the-Loop) simulations to accelerate your autonomous vehicle project timeline while improving quality and reducing costs.
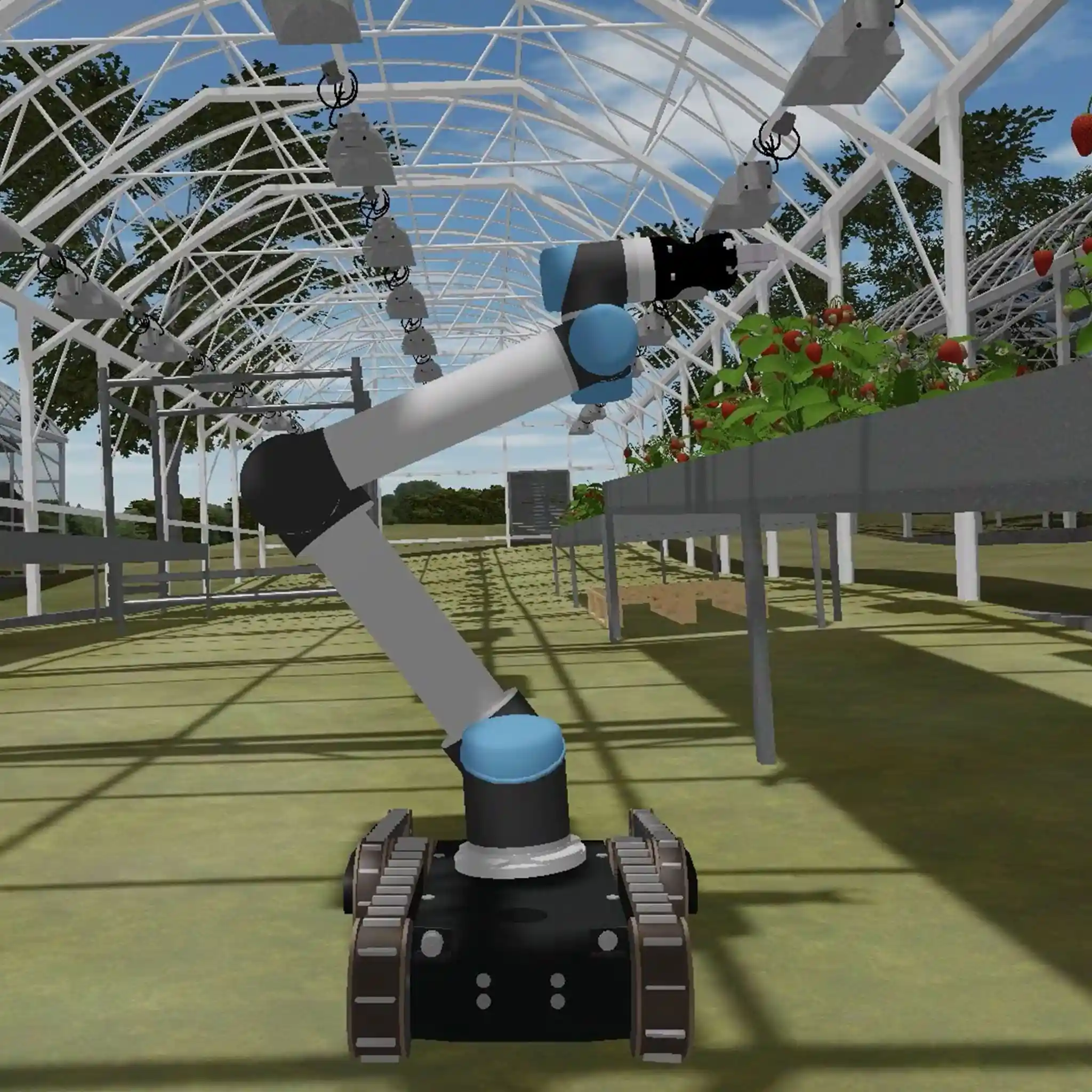
Simulation of autonomous agricultural systems using 4DV-SIM
Want to accelerate the development of your autonomous vehicles or robotics without the risks associated with real-world testing? In this video, discover how OPAL-RT’s 4DV-SIM provides a high-fidelity 3D simulation environment designed for on-road and off-road systems. With built-in support for advanced sensors such as cameras, LiDAR, IMUs, and GNSS, you’ll see how easily you can simulate complex scenarios, validate performance, and move from concept to deployment faster and with greater confidence.
Equipment for HIL testing
Are you looking to test your in-vehicle hardware (camera) with maximum precision, without the limitations of traditional OTA testing? The XYON range offers a high-performance solution for directly injecting raw camera data into critical scenarios, as well as a high-end simulator model for configurations requiring complex and varied simulation. The XYON range enables a level of realism and reliability essential for the development of autonomous systems.
Supporting innovation in various fields
Since 1997, we have helped thousands of innovators across various industries showcase their research and products to the world through real-time simulation. We are proud to continue this tradition with leaders in the field of autonomous systems.



4DV-SIM
Technical Details
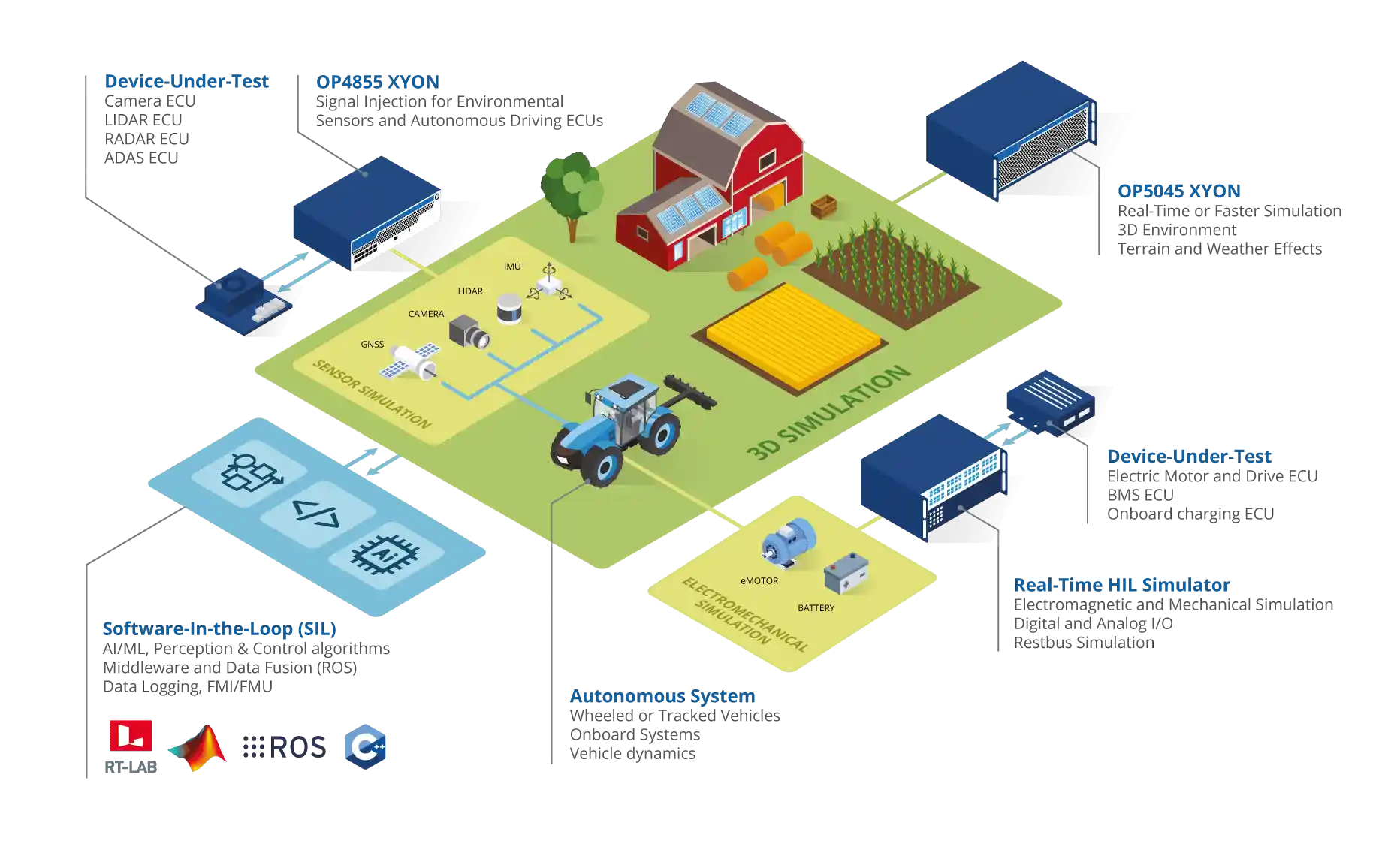
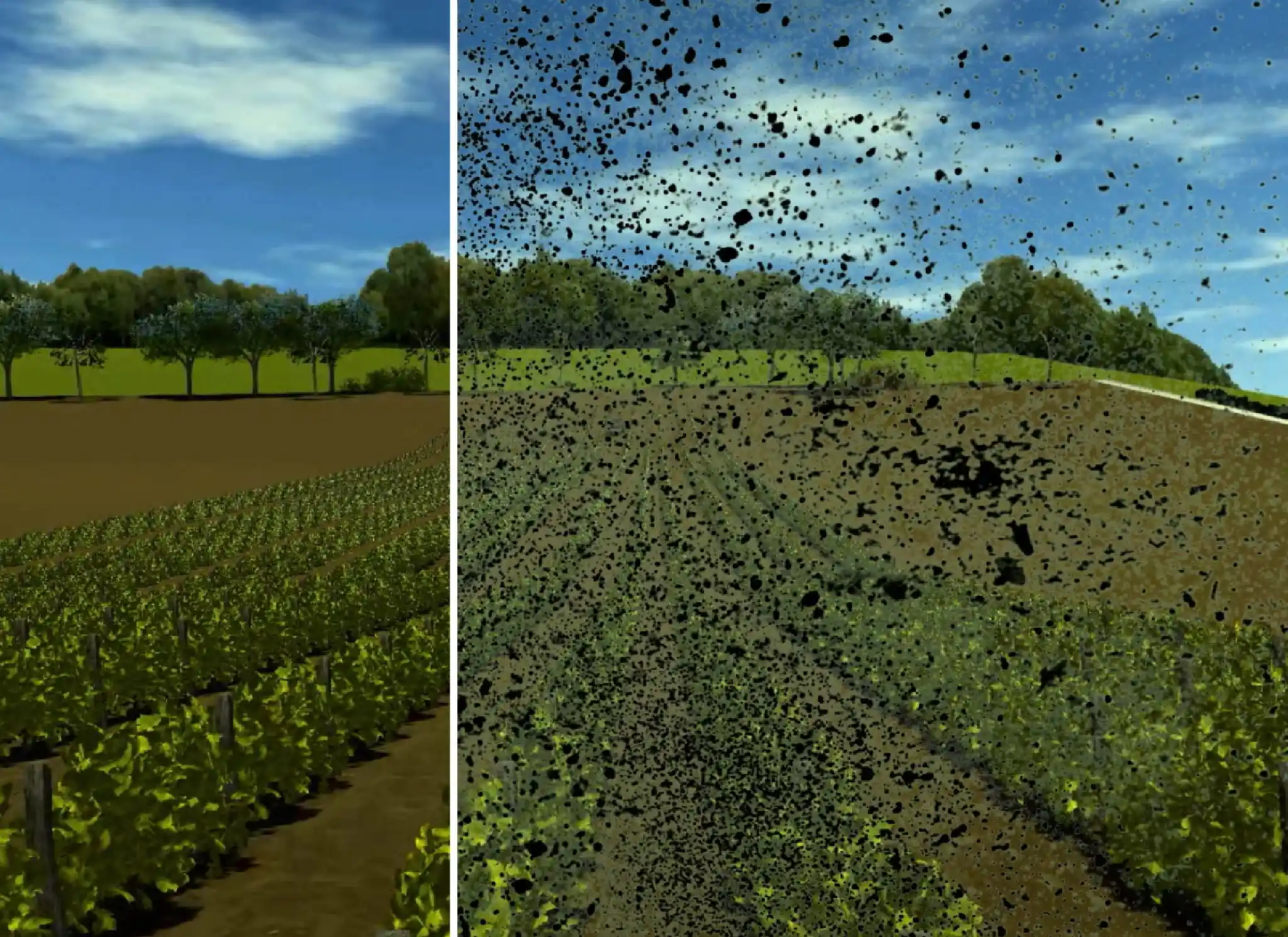
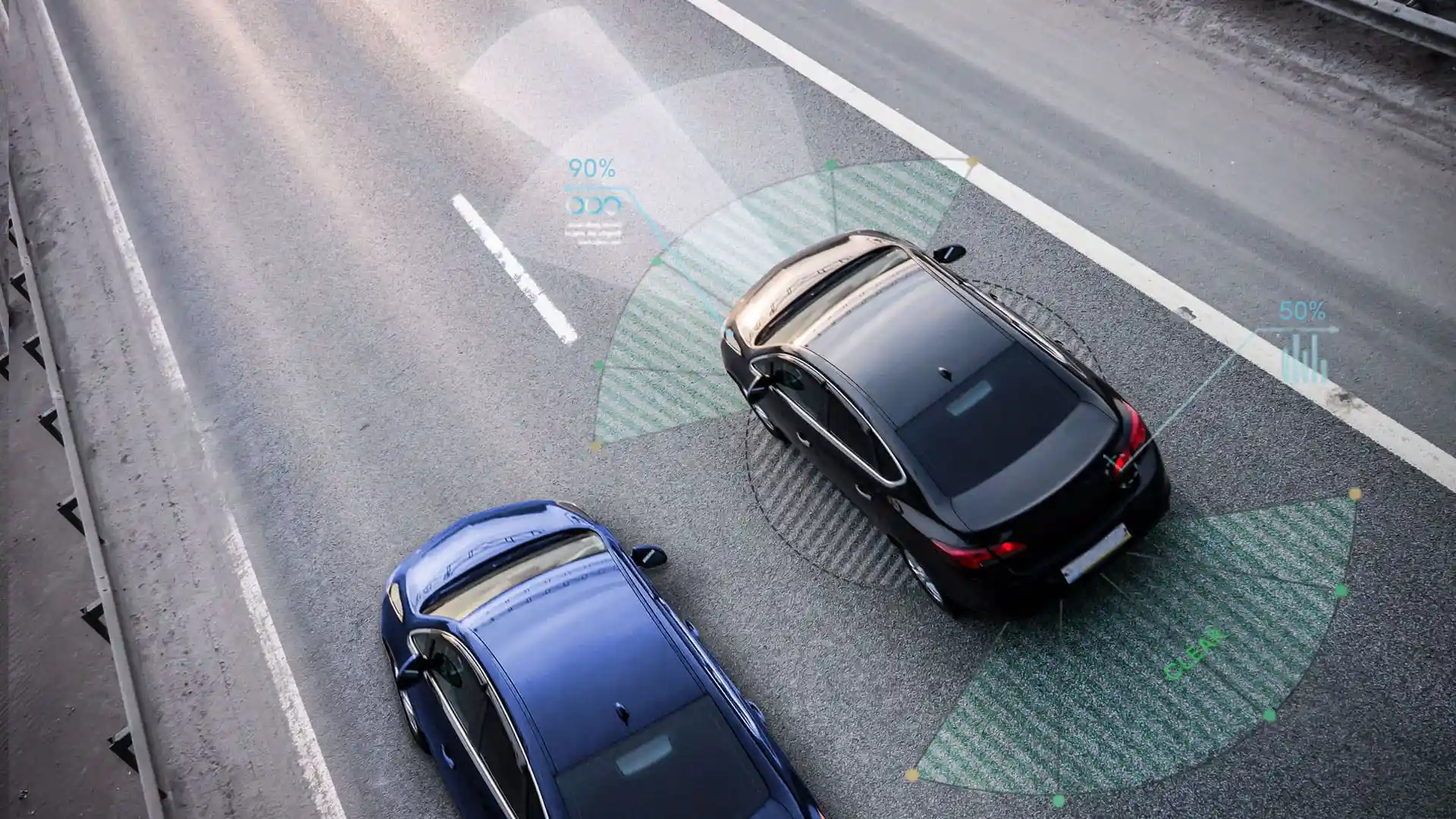
Sensors and data fusion
Simulate multiple sensors, such as cameras, GNSS, LiDAR, and radar, to estimate distances, speeds, and other data in a 3D environment. Additionally, combine these different data sources to make predictions or decisions.
Deep learning
Reduce risk and accelerate time-to-market by simulating deep learning models. Our solution helps engineers improve accuracy when the vehicle reads and detects pedestrians, traffic signs, and objects.
Communication protocols
Emulate industry-standard communication protocols such as CAN, CAN-FD, CANopen, LIN, and Automotive Ethernet, and perform the most realistic real-time simulations possible.
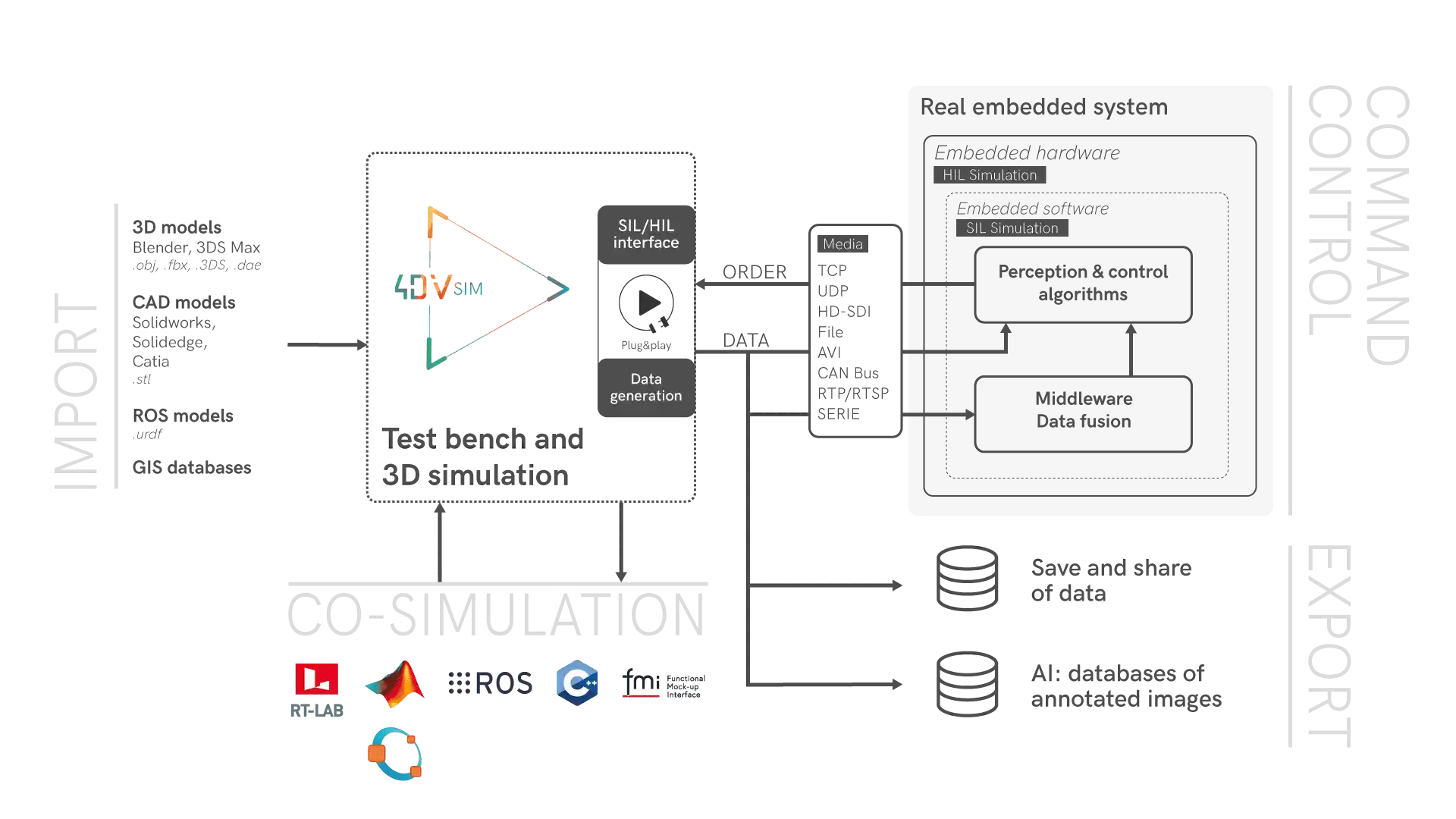
An open simulation environment
With 4DV-SIM, users can import a wide range of models and GIS files, co-simulate with standalone systems and common robotic tools—such as ROS—and easily connect with external systems and software.
XIL Simulation Capabilities
Are you looking to adopt a step-by-step approach within a comprehensive, flexible, and scalable framework to accelerate the development of your autonomous systems? OPAL-RT 4Drive provides you with advanced XIL (X-in-the-Loop) simulation capabilities, allowing you to progressively test and validate algorithms, controllers, and/or electronic architectures using representative virtual data, while reducing the costs and risks associated with real-world testing.
Our simulation capabilities include SIL (Software-in-the-Loop) simulation, which enables rapid validation of compiled embedded code, as well as HIL (Hardware-in-the-Loop) simulation, which additionally integrates physical components—ECUs, sensors, actuators—into a real-time loop to test their behavior in a variety of scenarios. Finally, DIL (Driver-in-the-Loop) simulation involves a driver or operator to analyze human-machine interactions and safely evaluate advanced driving functions.
Together, these XIL capabilities, supported by OPAL-RT 4Drive’s real-time platforms, help accelerate the development of autonomous vehicles while enhancing their safety, reliability, and overall performance.
Advancing the autonomy of off-road vehicles through simulation
To learn more about 4DV-SIM, watch our webinar on using simulation to develop autonomous off-road vehicles and robots.

A loop-based driving simulator for research on autonomous vehicles
In this demonstration, we showcase the closed-loop capabilities of the Autonomous Vehicle Platform (AVP) by presenting a model of the driver’s configuration and perception within the loop and retrieving sensor data in real time.
