








Different types of sensors
We leverage our expertise in robotics to develop sensor models that accurately reflect their real-world counterparts: operating modes, interactions with the environment, disturbances, performance, and hardware characteristics (connectors, media, protocols).
These sensors can either be used in 4DV-SIMULATOR via fully configurable generic models, or configured and emulated to match commercially available sensors intended for use in your actual systems.
Available sensor types:
- Perspective camera
- Fish-eye camera
- Omnidirectional camera
- Depth camera
- Normal camera
- Semantic camera
- 2D Lidar
- 3D Lidar
- Inertial Measurement Unit (IMU)
- GNSS
- Altimeter
- Gyroscope
- Anemometer
- Odometry
- Position sensor

Proprietary sensors implemented
Different types of systems
4DV-SIMULATOR uses models that represent robotic systems: vehicles, robots, drones, and robotic arms.
The dynamic behavior of these systems adheres to the constraints of their real-world counterparts, such as their obstacle-crossing capability, stability, behavior in terms of tire-to-road contact, response to wind disturbances for drones, collision management, and so on.
Types of systems that can be simulated:
- Wheeled vehicles
- Vehicles with one or more steering axles
- Multi-wheel-drive vehicles
- Rail vehicles
- Track systems
- Multirotor drones
- Turreted vehicles
- Construction equipment
- Work platform
- Forklift
- Hitch and multi-jointed system
- Multi-jointed arm

An open simulation
The 4DV-SIMULATOR is designed to be connected directly to your hardware (data acquisition cards, control systems, ECUs, workstations, PLCs, etc.).
This H.I.L. (Hardware-in-the-Loop) interface ensures the efficient integration of your perception and control applications, as well as the development of your embedded AI and the configuration of your communication systems.
Once you have validated the behavior of your applications through simulation, you can immediately apply the results of your development work during the actual debugging phase.
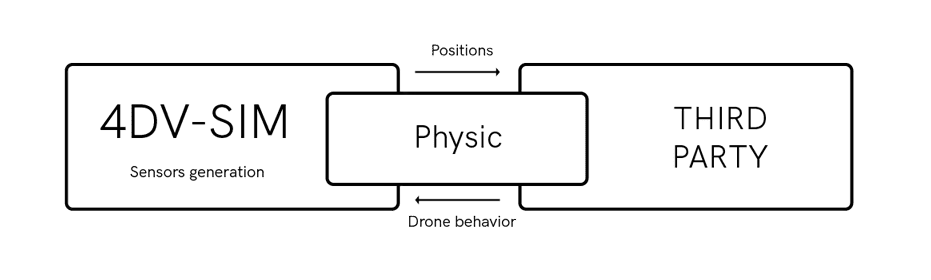
4DV-SIMULATOR is an open platform for co-simulation with other modeling and simulation tools. You define in 4DV-EDITOR the communication methods and the data exchanged to customize your development and test architecture.
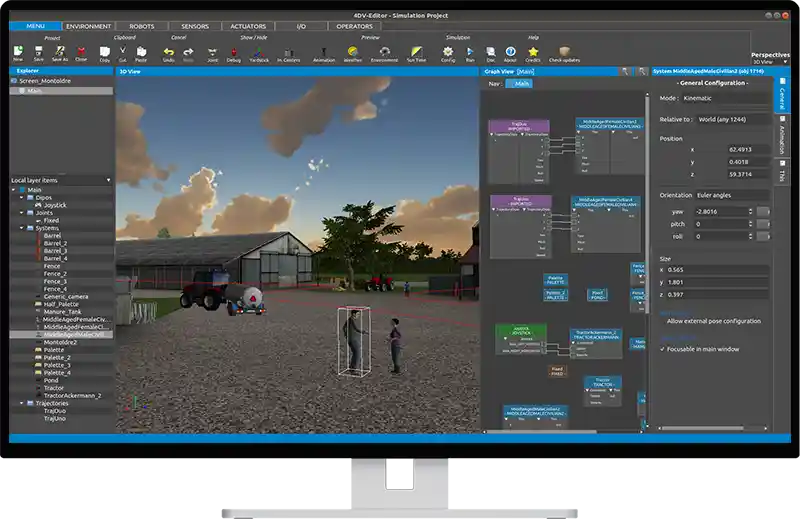
Principle of realistic modeling

This allows you to build digital twins that incorporate multi-sensor instrumentation.

On the one hand, the 4DV-SIMULATOR technology consists of various calculation engines (visual rendering, physical calculations, agent management, etc.).
These components work together seamlessly, powered by a proprietary, patented engine, to deliver a functional real-time 3D simulation.
In addition, 4DV-SIM adapts to your simulation needs thanks to the scalable nature of its multi-processor hardware architecture (which allows for the addition of peripheral cards and computing capacity) as well as its software architecture.
Resources
4DV-SIMULATOR allows you to simulate the entire library of models available in 4DV-EDITOR. In addition to sensor and system models, you will find environment, object, and agent models:
Environments
- Outdoor: off-road, urban, highway, etc.
- Indoors: parking lot, building, factory, etc.
- Reproductions of real-world environments
Items
- Street furniture, signage, etc.
- Weapons, vegetation, etc.
Kinetic and dynamic agents
- Civilian and military vehicles
- Pedestrians, soldiers, threats
- Robots and drones