




Nos références clients
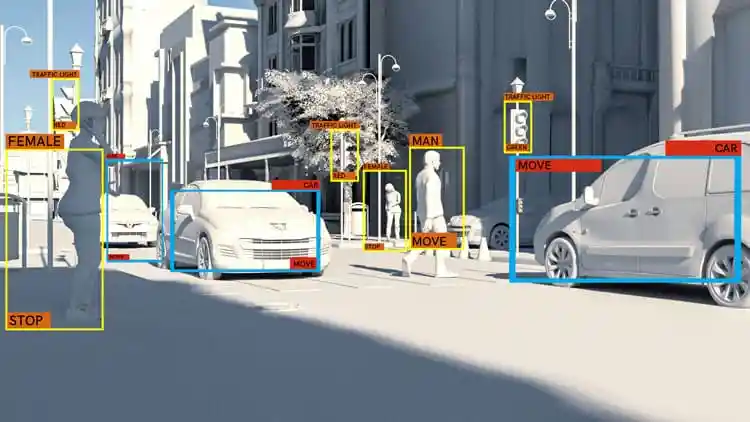
Véhicules en milieu urbain

L’avènement de la conduite automatisée au sein des véhicules que nous utilisons quotidiennement est à la fois un défi technologique immense et une opportunité sans pareille pour augmenter la valeur ajoutée de ces « machines » au sein de nos villes modernes.
Les possibilités offertes sont multiples : réduire le nombre d’accidents, fluidifier la circulation et diminuer son impact sur l’environnement, utiliser la voiture comme un service (CaaS) pour des missions de livraisons autonomes, etc.
Nos produits sont développés et organisés de manière cohérente pour permettre le test des différentes applications utilisées dans ce cadre : perception, contrôle commande et communication V2X.
OPAL-RT 4Drive vous accompagne également dans la préparation d’environnements 3D virtuels géoréférencés et réalisés à partir scan et relevés sur sites réels. Ce type de ressource vous permet facilement la réalisation de tests au sein d’un environnement à haut niveau de représentativité, pour assurer le succès des déploiements que vous réaliserez dans la réalité.

Convoi de véhicules sur autoroute

L’intégration du véhicule autonome sur l’autoroute au travers du transport de personnes ou de marchandises permet d’imaginer un cadre très favorable pour améliorer la vie des usagers et diminuer les risques liés à ces trajets.
Que ce soit pour l’organisation et la gestion des configurations de convois, ou que ce soit pour le partage quasi instantané de l’information V2X (conditions de circulation, risques, etc), nos produits vous offrent un cadre de travail ouvert et facilement intégrable à votre workflow de tests et simulation.
Pour vous permettre de définir l’architecture capteurs nécessaire à la perception et à la communication, notre plateforme logicielle met également à votre disposition une bibliothèque de capteurs émulés conformément aux capteurs réels offrant la possibilité de créer des jumeaux numériques fidèles.

Prévention des accidents de la route

La prévention des accidents est au cœur du développement de tout véhicule autonome ou assisté. Qu’ils soient liés à un obstacle extérieur ou au comportement du système lui-même, les risques doivent être anticipés et validés avant tout déploiement.
Nos solutions couvrent l’ensemble du cycle de développement : définition des scénarios de test, simulation des algorithmes de perception et de contrôle-commande, visualisation des données capteur en temps réel et génération de séries de simulations pour valider le comportement dans une large variété de conditions.
Les capacités XIL — dont les tests HIL (Hardware-in-the-Loop) — complètent ce cadre en évaluant les performances logicielles et matérielles dans un environnement maîtrisé, pour accélérer la validation avant déploiement.